Как роботы прикинулись термитами и построили дом
Категория: События | Автор: eEvent | Февраль 20, 2014

Как роботы прикинулись термитами и построили дом

Три робота строят замок из «кирпичей». Эта троица без всякого централизованного руководства способна построить самые замысловатые сооружения. Рис. из обсуждаемой статьи в Science
Наблюдения за сооружением монументальных термитников вдохновили ученых на создание специальных роботов-строителей. Эти роботы, подобно термитам, были лишены централизованного управления и руководствовались при этом простыми правилами поведения, актуальными «здесь и сейчас». Роботы воспринимали присутствие других роботов и положение стопок строительных кирпичей и, умея манипулировать кирпичами, возводили требуемые постройки. Так ученые показали, что сложные задачи возможно выполнить с помощью автономно действующих единиц, которые ориентируются в местной обстановке и снабжены одинаковыми простейшими правилами поведения.
Трое специалистов из Института Вайса Гарвардского университета сконструировали роботов, которые предназначались для строительства. Правда эти роботы больше напоминали игрушки, и должны были не столько возводить настоящие высотки, сколько показать возможности альтернативных систем управления.

Так выглядит робот-строитель. Его параметры 171112 см, вес 800 г, детали выполнены на 3D-принтере. Вид сбоку: 1 — трехлучевые колеса, удобные для преодоления препятствий и для шагания по ступенькам вверх и вниз; 2 — хваталки кирпичей, которые поднимают кирпич из общей стопки и сгружают его на место; 3 — держалки для кирпичей; 4, 5 — инфракрасные сенсоры, распознают черное и белое, оценивают расстояние вверх и вниз; 6 — ультразвуковые сенсоры (эта система подсмотрена конструкторами у летучих мышей, а не у термитов). Три автономных моторчика приводят конструкцию в движение, заряда хватает на час-полтора. «Кирпич» размером 21,521,54,5 см и весом 200 г сделан из пенополиуретана с 16 неодимовыми магнитами по всем граням (8); форма приспособлена для хваталок робота (7, 9–11). Схема из дополнительных материалов к обсуждаемой статье
Эти миниатюрные роботы умели складывать строения из специальных кирпичиков, но их действия сильно отличались от работы всех предыдущих моделей. Представим себе процесс возведения дома. Сначала архитектор делает чертеж, потом нанимаются рабочие, к ним приставляется знающий прораб, который способен прочесть чертеж и руководить рабочими. Потом строительство начинается, рабочие в соответствии со своими навыками выполняют последовательные операции, прораб пытается оптимизировать процесс. Прочность и удобство здания зависит от талантов архитектора и опыта и совести прораба и исполнителей.
Но есть и другой способ что-то построить. Его реализуют общественные насекомые, например термиты. У них нет изначального плана, представленного главным термитом-архитектором, у них нет централизованного управления в лице прораба. Есть только отдельные насекомые, которые выполняют простые строительные операции. Они руководствуются не приказами начальника, а простыми правилами поведения, соответствующими ситуации «здесь и сейчас». Их действия полностью зависят от текущей обстановки, от того, какие операции выполняли их собратья на предыдущем этапе. Такой принцип координации действий называется стигмергическим (см. Stigmergy). В результате у термитов получаются сооружения не менее величественные, чем человеческие небоскребы. Они создают их, несмотря на отсутствие продуманного плана и централизованного управления.

Термитники в пустыне напоминают города. Разные колонии термитов имеют свой «архитектурный стиль», который передается генетически (см.: N. Mizumoto, K. Matsuura, 2013. Colony-specific architecture of shelter tubes by termites); постройки очень крепкие, превосходно вентилируются, внутри поддерживается нужный терморежим. Фото с сайта www.outdoors.ru
Гарвардские конструкторы решили реализовать для своих роботов «термитный» способ строительства. Они лишили роботов централизованного управления от имени «Главного Компьютера», а вместо этого задали им набор простых правил поведения. Эти правила диктовались исходя из текущей обстановки: присутствия других роботов, расположения уже уложенных кирпичиков. Также у этих роботов имелись жестко закрепленные, «инстинктивные», навыки и правила. Они могли брать, поднимать и опускать кирпичи, ползти вперед и назад, поворачивать и поворачиваться вокруг своей оси, залезать на одну ступеньку вверх и спускаться на одну ступеньку вниз. Двигались они только по часовой стрелке, чтобы не создавать «пробки» на дороге. Также им не разрешалось класть кирпичик, если справа и слева уже лежит по кирпичику: это правило было задано, чтобы не ограничивать маневренность робота, так как в этом случае робот не мог развернуться. Положить кирпич наверх можно только в том случае, если рядом есть ступенька; в противном случае робот не сможет слезть с башни. Смогут ли роботы, снабженные этими правилами, построить дом?

Действия, которые запрещены роботам. A — если имеется промежуток, шириной в кирпич, то туда кирпич нельзя вставлять; в противном случае робот может застрять. B — пристраивать кирпичи предпочтительно справа и слева от уже положенного первого кирпича (серый); в результате получаются линии. C — такого цикла получиться не может, так как в этом случае роботу придется вставлять кирпич в промежуток между двумя соседними. D — такие высокие коридоры робот строить не может, так как застрянет на повороте. Схема из дополнительных материалов к обсуждаемой статье
Трем отлаженным роботам дали старт, и они принялись строить (процесс снят здесь). Роботы-строители ползали на своих трехлучевых ходилках, обходя аккуратно друг дружку, копошились вокруг стройки с кирпичами и без, взбирались по ступенькам и аккуратно спускались вниз, укладывали кирпичи в порядке, понятном только им, — и вот готова пирамида Чичен-Ица… а вот Эмпайр-стейт-билдинг.

Последовательные стадии строительства модели Эмпайр-стейт-билдинг. Рис. из обсуждаемой статьи в Science
Нужно подчеркнуть особо, что, в отличие от термитов, конструкторы задали своим роботам требуемый конечный результат. Он реализовывался набором координат в пространстве, которые должны быть заполнены кирпичами. (Правду сказать, нам неизвестно, имеется ли у термитов представление о конечном результате.) Если его не задавать, то у роботов получается ветвящаяся конструкция, этакий лабиринт расходящихся тропок… Его устройство зависит целиком от набора правил и запретов и от текущей обстановки (где и что уже построено). Авторы отмечают, что такими принципами человек руководствуется при сооружении городов. Так или иначе, роботы обошлись без прораба, который бы указывал, кому и куда двигаться и кому и куда укладывать кирпич. Они справились с задачей, а требуемую конструкцию выстраивали каждый раз новым способом.
Такая система, как указывают ее создатели, проста: каждому роботу задан небольшой набор одинаковых правил поведения. Она обладает необходимой ситуационной гибкостью, а конечный результат всегда так или иначе достигается. Важно, что система при этом лишена всех недостатков централизованного управления, когда приходится анализировать слишком большой объем информации и находить оптимальное решение одновременно для всех действующих элементов. Такая система автономно действующих роботов открывает превосходную возможность для строительства объектов в труднодоступных районах или опасных ситуациях. Для ее реализации придется, правда, решить много технических задач, но всё же. Кроме того, есть над чем поразмыслить теоретикам-философам: здесь и принципы централизованного и децентрализованного управления, и непредсказуемость суммы простых правил в сложных системах…
Похожие новости
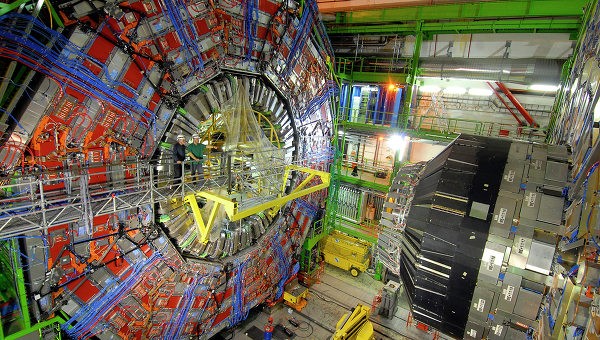 ЦЕРН: эксперименты в БАК по поиску темной материи начнутся 3 июня
ЦЕРН: эксперименты в БАК по поиску темной материи начнутся 3 июня Астрономы нашли протогалактику с необычной оболочкой
Астрономы нашли протогалактику с необычной оболочкой Землетрясение магнитудой 7,2 произошло в Греции
Землетрясение магнитудой 7,2 произошло в Греции Пентагон: без РД-180 с 2016 г США не смогут запускать военные спутники
Пентагон: без РД-180 с 2016 г США не смогут запускать военные спутники Первый российский прибор для изучения планет-гигантов создадут в МФТИ
Первый российский прибор для изучения планет-гигантов создадут в МФТИ Убийственная «свобода слова»: как избавляются от неугодных режиссёров в США
Убийственная «свобода слова»: как избавляются от неугодных режиссёров в США Физики впервые обнаружили экситоны в металле
Физики впервые обнаружили экситоны в металле Ученые определили область возникновения мощных гамма-всплесков
Ученые определили область возникновения мощных гамма-всплесков Россия может создать систему обнаружения метеоритов уже к 2030 году
Россия может создать систему обнаружения метеоритов уже к 2030 году Астрономы NASA объявили об открытии 715 новых экзопланет
Астрономы NASA объявили об открытии 715 новых экзопланет «Зоопарк» квазичастиц пополнился квантовыми каплями
«Зоопарк» квазичастиц пополнился квантовыми каплями Черные дыры выбрасывают больше энергии, чем считалось ранее
Черные дыры выбрасывают больше энергии, чем считалось ранее
Журнал научной фантастики благодарит всех тех, кто поделился своими теориями, наблюдениями и просто красивыми историями!